Odată cu dezvoltarea viguroasă a industriei electronice, detectarea poziției unor componente structurale se schimbă lent de la măsurarea inițială de contact la măsurarea fără contact prinSenzor de poziție Hall și magnet. Cum putem alege un magnet potrivit în funcție de produsele și structura noastră? Aici facem niște analize simple.
În primul rând, trebuie să determinăm materialul magnetului. În prezent, magnetul de samariu-cobalt și borul de fier neodim sunt utilizate pe scară largă în senzorul de poziție Hall. Principala diferență dintre cei doi magneți este că, pe baza aceluiași volum, magnetii NdFeB sunt mai puternici decât magneții de samariu-cobalt; excursia termică a cobaltului de samariu este mai mică decât cea a Nd-Fe-B; rezistența la oxidare a cobaltului de samariu este mai puternică decât cea a Nd-Fe-B, dar în general există o acoperire pe exteriorul magnetului, care poate rezolva problema oxidării; magnetul de samariu-cobalt are o rezistență la temperatură mai bună decât magnetul NdFeB, dar valoarea rezistenței la temperatură pentru ambele materiale ale magnetului poate ajunge la mai mult de 200 ℃. Prin urmare, atunci când selectăm tipul de magnet, ar trebui să îl evaluăm în combinație cu performanța costurilor, temperatura de lucru și mediul de lucru. În general, NdFeB poate fi folosit mai mult, în principal pentru că are cele mai bune caracteristici de câmp magnetic. Cu toate acestea, atunci când lucrați într-un interval larg de temperatură, este recomandat să alegeți magnetul de samariu-cobalt din cauza derivei sale termice mici.
În plus, trebuie să determinăm câțiva parametri de bază ai magnetului. În funcție de informațiile despre poziția de testare și direcția de mișcare a obiectului, determinăm dacă direcția de magnetizare a magnetului este diametrală sau axială. În plus, se stabilește dacă se selectează omagnet pătratsau amagnet cilindricconform structurii de instalare. Desigur, uneori trebuie să personalizăm forma magnetului în funcție de structură. Există un alt factor de cerință legat de fluxul magnetic, care a fost întotdeauna preocuparea noastră în selectarea magnetului. De fapt, trebuie să o analizăm în următoarele două aspecte:
1. Intensitatea câmpului magnetic indus de senzorul de poziție Hall în sine și domeniul de câmp magnetic indus în fiecare direcție vor fi marcate clar în cartea de date a senzorului.
2. Distanța dintre magnet și senzorul în sine este determinată în general de structura produsului. Conform celor două aspecte de mai sus și curbei de modificare a câmpului magnetic din figura de mai jos, ca exemplu, putem determina intensitatea câmpului magnetic al magnetului necesar.
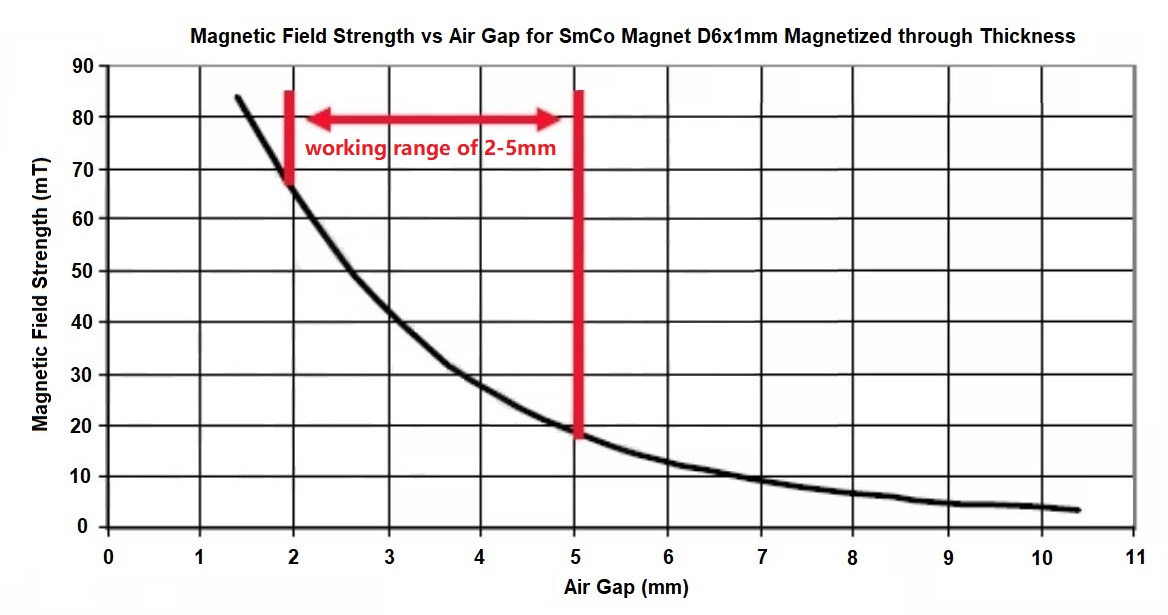
În cele din urmă, trebuie să înțelegem că nu înseamnă că atâta timp cât câmpul magnetic cade pe cerințele de rază ale senzorului, magnetul poate fi la fel de departe de senzor. Deși senzorul în sine are funcție de calibrare, trebuie să înțelegem că atunci când magnetul este prea departe de senzor, distribuția câmpului magnetic în sine este dificil de asigurat liniaritatea sau aproape de liniaritate. Aceasta înseamnă că odată cu schimbarea poziției și distribuția neliniară a câmpului magnetic în sine, măsurarea senzorului va deveni complexă, iar calibrarea va deveni foarte complexă, astfel încât produsul să nu aibă reductibilitate.
Cele de mai sus sunt doar o simplă analiză a selecției magnetului în aplicațiile senzorilor Hall. Sperăm că vă va fi de ajutor. Dacă aveți alte întrebări în timpul procesului de dezvoltare, vă rugăm să ne contactați,Ningbo Horizon Magnetics. Putem comunica în continuare și vă putem oferi asistență tehnică.
Ora postării: 12-aug-2021